Using the micro:bit to inspire students
Luke Spademan
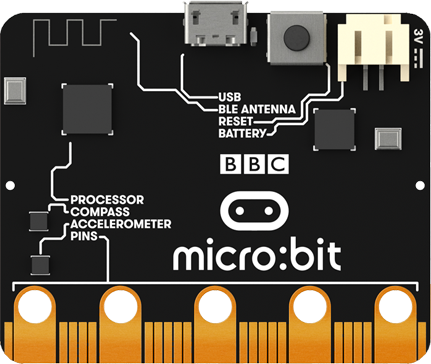
What is a micro:bit?
Micro:bit
Micro:bit
Mu
Mu
“a simple Python editor for beginner programmers”
Mu
- Simple text editor
- Easy to use
- No bloat
- Build for the micro:bit
codewith.mu/en/tutorials
How does this work?
First programs comparison
First non-micro:bit program
print("Hello, World!")
Hello, World!
First micro:bit program
from microbit import *
display.scroll("Hello, World!")
“If the micro:bit is so great, why do I need a robotic arm?”
The same benefits but more
- You're moving a physical object
- You wrote the code to make it move
- More relatable to future applications
Demos
- Micro:bit is small
- Robotic arm is bigger
- Visual and Dramatic
Example
Equipment
Equipment
| Items | Link | Price (€) |
|---|---|---|
| Robotic Arm | lspade.xyz/l/roboticarm | 15,08 |
| Breadboard | lspade.xyz/l/breadboard | 2,75 |
| Jumper Wires | lspade.xyz/l/jumperwires | 3,97 |
| Edge Connector | lspade.xyz/l/edgeconnector | ~5,81 |
Setup
Expectation
Reality
Servo Calibration
from microbit import *
angle = 90
while True:
if button_a.was_pressed():
angle += 5
pin0.write_analog(angle)
print(angle)
if button_b.was_pressed():
angle -= 5
pin0.write_analog(angle)
print(angle)
Code
Code: Setup
from microbit import *
servos = [pin0, pin1, pin2, pin16]
min_angles = [5, 50, 5, 5]
max_angles = [180, 130, 145, 180]
states = [5, 50, 5, 5] # position of each servo
s = 0 # current servo
d = 5 # angle increment
Code: Loop
while True:
if button_a.is_pressed():
states[s] += d
if states[s] > max_angles[s] or states[s] < min_angles[s]:
states[servo] -= d
d *= -1 # start moving in the other direction
servos[s].write_analog(states[s])
sleep(100) # wait 100ms before checking for press
if button_b.was_pressed():
s += 1
if s == 4:
s = 0
d = 5
Live Demo?
Other Ideas
LEDs
from microbit import *
while True:
pin1.write_digital(1)
sleep(500)
pin1.write_digital(0)
sleep(500)
LEDs & Touch
from microbit import *
while True:
if pin0.is_touched():
pin1.write_digital(1)
else:
pin1.write_digital(0)